เครื่องเรดาร์เรือ (Marine Radar)
เครื่องเรดาร์ตรวจการณ์ประจำเรือ (Marine Radar)
ระบบเรดาร์ทางเรือ หรือ Marine Radar
เป็นเครื่องมือช่วยในการเดินเรือใช้สำหรับตรวจจับวัตถุ
รวมทั้งการหาตำแหน่งและความเร็วของวัตถุที่จับได้นั้น
มีเริ่มใช้กันตั้งแต่ก่อนสงครามโลกครั้งที่สอง ในช่วงสงคราม
เครื่องเรดาร์ถูกใช้สำหรับ
ตรวจหาเครื่องบินหรือเรือรบของข้าศึกที่เข้ามาในพื้นที่ตรวจจับของเรดาร์
ซึ่งในปัจจุบันเรดาร์ถูกนำมาใช้ประโยชน์ในงานต่างๆ หลายอย่าง ดังเช่น
เรดาร์ประจำเรือเดินทะเล, เรดาร์ประจำหอควบคุมท่าเรือหรือสถานีชายฝั่ง,
เรดาร์ประจำหอบังคับการของสนามบิน และเรดาร์สำหรับจับภาพของสภาพอากาศจะจับภาพ
ของก้อนเมฆและการเคลื่อนที่ของมัน
ตลอดจนใช้ในงานตรวจจับวัตถุทางภาคพื้นดินของกองทัพบก เป็นต้น

หลักการทำงานของเรดาร์เป็นดังนี้ ตัวเรดาร์จะส่งสัญญาณพัลส์ (pulse)
ซึ่งเป็นสัญญาณช่วงสั้นออก ไปในลักษณะของคลื่นวิทยุ
เมื่อคลื่นกระทบกับวัตถุที่กีดขวางเส้นทางของคลื่นวิทยุ
คลื่นวิทยุนั้นก็จะถูกสะท้อนกลับโดยวัตถุนั้นและสัญญาณสะท้อนกลับจะถูกรับมาวิเคราะห์ด้วยเครื่องรับของเรดาร์
ผลจากการวิเคราะห์เครื่องเรดาร์จะสามารถบอกระยะทาง (ตำแหน่ง)
และความเร็วของวัตถุได้
ระยะทางสามารถคำนวณจากเวลาที่สัญญาณใช้ในการเดินทางจากเครื่องส่ง
แล้วสะท้อนกลับมายังเครื่องรับของเรดาร์
ระยะทางจึงเท่ากับครึ่งหนึ่งของผลคูณระหว่างความเร็วและเวลาที่คลื่นเดินทางไปและกลับ
ส่วนความเร็วของวัตถุในทิศทางที่วิ่งสู่เครื่องเรดาร์นั้นคำนวณได้จากหลักของดอปเปลอร์
(Doppler principle) กล่าวคือ เมื่อวัตถุวิ่งเข้าสู่เครื่องเรดาร์
สัญญาณสะท้อนกลับจะมีความถี่เพิ่มขึ้นจาก ความถี่ของสัญญาณที่ส่งออกไป
ระบบเรดาร์เรือทั่วไปจะแบ่งออกเป็นสามประเภทหลัก คือ
เรดาร์แบบ X - BAND มีความถี่ 6,200 - 10,900 MHz มีความยาวคลื่น 2.75 -
4.84 เซนติเมตร เป็นเรดาร์ขนาดเล็ก
เหมาะในการติดตั้งสำหรับเรือขนาดเล็กจนถึงปานกลางทั่วไป เรือประมงทะเล
หรือใช้งานเป็นเรดาร์ตัวที่สองสำหรับเรือเดินทะเลขนาดใหญ่
มีความสามารถในการตรวจจับวัตถุในระยะใกล้ได้เป็นอย่างดี
แต่เนื่องจากเป็นเรดาร์ขนาดเล็ก ความยาวคลื่นจึงสั้น
เมื่อคลื่นของเรดาร์กระทบเป้ามาก จะมีการสูญเสียพลังงานมาก
ทำให้เป้าหรือวัตถุที่ปรากฏบนจอเรดาร์มีรูปร่างผิดเพี้ยนไปจากความเป็นจริง
เรดาร์ชนิดนี้มีรัศมีทำการประมาณ 100 กม. และช่วงรัศมีหวังผลประมาณ 60 กม.
เรดาร์แบบ C - BAND มีความถี่ 3,900 - 6,200 MHz ความยาวคลื่น 4.84 - 7.69
เซนติเมตร เป็นเรดาร์ขนาดปานกลาง ปัจจุบันไม่ค่อยนิยมใช้ติดตั้งบนเรือ
เนื่องจากเป็นเรดาร์ขนาดปานกลางที่มีราคาค่อนข้างสูงและประสิทธิภาพใกล้เคียงกับเรดาร์แบบ
S-BAND เรดาร์ชนิดนี้มีรัศมีทำการประมาณ 450 กม.และช่วงรัศมีหวังผลประมาณ 230 กม
เรดาร์แบบ S - BAND มีความถี่ 1,550 - 3,900 MHz ความยาวคลื่น 7.69 - 19.3
เซนติเมตรเป็นเรดาร์ขนาดใหญ่ เหมาะสำหรับติดตั้งในเรือประมงทะเลขนาดใหญ่
หรือเรือเดินทะเลขนาดปานกลางขึ้นไป
มีขีดความสามารถตรวจจับวัตถุในระยะไกลได้เป็นอย่างดี
ภาพวัตถุหรือเป้าที่จับได้นั้นมีรูปร่างผิดเพี้ยนไปจากความเป็นจริงไปบ้างเล็กน้อยหรือไม่ผิดเลย
เรดาร์ชนิดนี้มีรัศมีทำการประมาณ 550 กม. และช่วงรัศมีหวังผลประมาณ 230 กม.
เรดาร์ เรือ ส่งคลื่นเรดาร์อยู่ในลักษณะใด ?
เรดาร์ตรวจอากาศจะส่งคลื่นเรดาร์ในลักษณะรูป
 เรียกว่า
PULSE ซึ่งภายในรูปนี้
จะมีคลื่นความถี่วิทยุบรรจุอยู่ภายในโดย
เรียกว่า
PULSE ซึ่งภายในรูปนี้
จะมีคลื่นความถี่วิทยุบรรจุอยู่ภายในโดย
 เมื่อเรดาร์ส่งคลื่นนี้ออกไปกระทบโดนเป้า
จะสะท้อนกลับมายังเรดาร์และคลื่นต่อไปจะออกจากเรดาร์ ในลักษณะเช่นนี้เรื่อยไป
เมื่อเรดาร์ส่งคลื่นนี้ออกไปกระทบโดนเป้า
จะสะท้อนกลับมายังเรดาร์และคลื่นต่อไปจะออกจากเรดาร์ ในลักษณะเช่นนี้เรื่อยไป
เรดาร์จะส่งคลื่นแม่เหล็กไฟฟ้า ออกมาในรูป PULSE มีช่วงสั้น
โดยออกจากเครื่องส่งไปยังปีกเสาอากาศเรดาร์ เมื่อกระทบเป้าหรือวัตถุ
จะเกิดการสะท้อนกลับมา ยังปีกเสาอากาศเรดาร์ เข้าสู่ภาคเครื่องรับ
ความแตกต่างระหว่างเวลาที่ส่งและรับ ของคลื่นแม่เหล็กไฟฟ้า เมื่อส่ง PULSE
ออกไปกระทบเป้าสะท้อนกลับมา สามารถหาระยะห่างของเป้าโดยกำหนดให้
R = C x AT/2
เมื่อ
R = ระยะของเป้าจากจานสายอากาศ
C = ความเร็วของแสงเท่ากับ 300 ล้านเมตรต่อวินาที
AT = ความแตกต่างระหว่างเวลาที่ส่งและรับสามารถหาความสูงของเป้ามุมในแนวราบ
และแนวดิ่งของเป้าซึ่งได้จาก การหมุนของปีกเสาอากาศเรดาร์

สายอากาศของเครื่องเรดาร์
สายอากาศที่หมุนได้รอบตัวของเรดาร์จะส่งคลื่นสัญญาณพัลส์สั้น ๆ
ของคลื่นวิทยุสลับกับรับสัญญาณที่สะท้อนกลับของมันหลังจากปล่อยพัลส์ออกไปแต่ละครั้ง
จุดบนจอภาพจะกราดจากศูนย์กลางไปยังขอบด้วยมุมที่สัมพันธ์กับมุมของสายอากาศสัญญาณสะท้อนกลับจากวัตถุที่อยู่ใกล้จะกลับมาก่อนจึงจึงปรากฏอยู่ใกล้ศูนย์กลางของจอภาพ
มีระบบการทำงานหลักแบ่งออกเป็นส่วนๆ ดังนี้
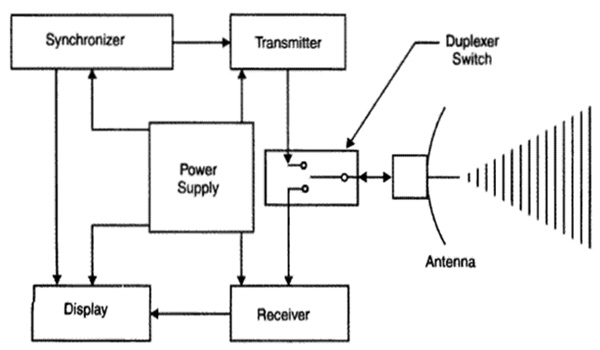
ระบบควบคุมห้วงเวลา (TIMING SYSTEM)
ในระบบTiming จะใช้สำหรับจัดลำดับการทำงานของระบบเรดาร์ บางครั้งจะเรียกว่า TRIGGER
GENERATOR, TIMER SYNCHRONIZER
หน้าที่ของ Timing System
สร้างคลื่นสัญญาณ PRF ( PULSE REPETION FREQUENCY) ส่วนจำนวน PULSE ในเวลาที่กำหนด
จะขึ้นอยู่กับหลักการใช้อุปกรณ์ดิจิตอลควบคุมการทำงานของชุด Modulator
และเครื่องส่ง (หลอด Magnetron ) ควบคุมระบบการทำงานของ ระยะที่อ่านได้ (Range
Readouts), ตำแหน่งของเป้าในขอบเขตวงแหวน (Range Strobe Position),
ขอบเขตวงแหวนที่กำหนด (Range Marks) สำหรับใช้กับจอภาพแบบต่าง ๆ สร้างเส้นกวาด
(Sweeps) บนจอภาพแบบต่าง ๆ ควบคุม
ขบวนการคำนวณข้อมูลสำหรับชุดประมวลผลภาพวีดีโอดิจิตอล DVIP(Digital Video
Integrator Processor)
ระบบควบคุมสัญญาณ (MODULATOR)
หน้าที่ของระบบควบคุมสัญญาณ MODULATOR ให้กระแสไฟฟ้า DC High Voltage Pulse
สำหรับให้หลอด Magnetron ที่อยู่ในภาคเครื่องส่ง ทำงานโดยใช้ระบบเวลา (Timing)
ควบคุมการสร้างสัญญาณเรดาร์ PULSE โดยคำนึงถึงเวลา และ ความกว้างของ PULSE
ซึ่งจะเป็นช่วงเวลา ในการเริ่มต้นและสิ้นสุดการส่ง เรียกว่า"PULSEDVISE DURATION"
เช่นเรดาร์ C - Band มี PULSE DURATION 3 MICROSECONDS, เรดาร์ S - Band มี PULSE
DURATION 1 และ 4 MICROSECON เป็นต้น
ระบบภาคส่งสัญญาณ (TRANSMITTER)
ในระบบภาคเครื่องส่ง จะประกอบด้วยส่วนสำคัญซึ่งได้แก่ หลอด Magnetron โดยอยู่
ร่วมกับ แท่งแม่เหล็ก
ดังนั้นสนามแม่เหล็กและสนามไฟฟ้าตัดกันในขณะเดียวกันกระแสไฟฟ้า DC High Voltage
Pulse จากชุด MODULATOR จะทำให้หลอด Magnetron ทำงานสลับกัน มีผลทำให้เกิด RF
Energy Pulseที่ความถี่หนึ่ง RF Energy ที่ได้จาก ระบบภาคเครื่องส่ง จะผ่านต่อไปยัง
Duplexer

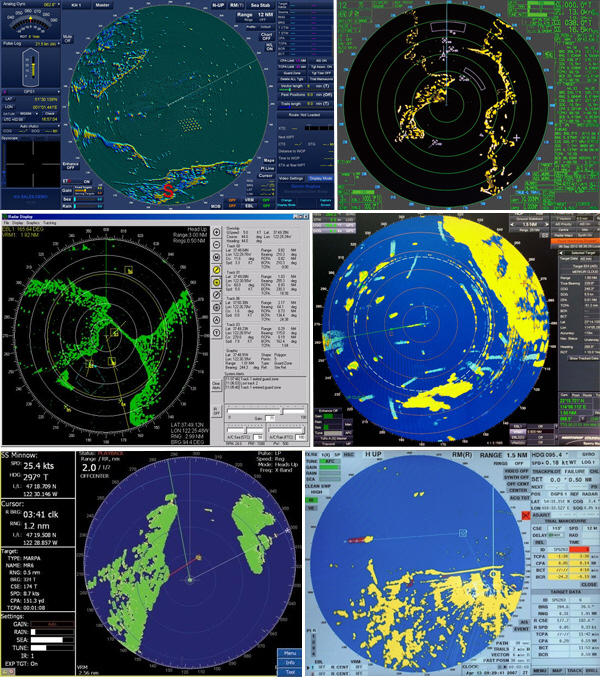
ชุดแสดงผล DISPLAY
ของเครื่องเรดาร์แบบแผงคอนโซลในสะพานเดินเรือ
ระบบควบคุมการรับส่งสัญญาณ (DUPLEXER)
ในระบบ Duplexer ที่ใช้กับเรดาร์นี้ จะทำหน้าที่รับและส่งโดย Duplexer
จะทำหน้าที่เป็นสวิทช์ต่อ
ระหว่างระบบปีกเสาอากาศกับระบบภาคเครื่องรับและภาคเครื่องส่ง ซึ่งภายใน มีลักษณะ
เป็นหลอด 2 หลอด (TR TUBES) มี 2 แบบ ในตอนส่ง RF Energy
กำลังส่งจะทำให้แก๊สที่บรรจุอยู่ภายในหลอดทั้งสองเกิดการแตกตัว ทำให้เกิดการลัดวงจร
ระบบภาคเครื่องรับจะไม่ทำงาน ดังนั้น RF Energy จะผ่านไปยังปีกเสาอากาศในตอนรับ RF
Energy ที่สะท้อนกลับแก๊สที่อยู่ภายในหลอดทั้งสองจะไม่แตกตัว
ระบบปีกเสาอากาศ (ANTENNA)
ปีกเสาอากาศสำหรับเรดาร์เดินเรือที่นิยมใช้ส่วนมากจะเป็นรูปแกนหมุน
โดยด้านหน้าปีกของเสาอากาศมีคุณลักษณะการนำที่ดี ลักษณะของคลื่นแม่เหล็กไฟฟ้า
ที่ออกจาก FEED เมื่อกระทบปีกเสาอากาศจะถูกจัดให้มีลักษณะเป็นมุมระนาบกว้าง
ส่วนในตอนรับคลื่นแม่เหล็กไฟฟ้าที่สะท้อนกลับมาจากเป้า
จะกระทบปีกเสาอากาศแล้วรวมตัวกันเข้าสู่ FEED เพื่อต่อไปยังระบบภาครับโดยผ่าน Wave
Guide และDuplexer

เสาอากาศเรดาร์มีทั้งเป็นแบบปีก และแบบโดม
ระบบภาครับสัญญาณ (RECEIVING SYSTEM)
คลื่นความถี่วิทยุ (RF) ที่สะท้อนกลับจากเป้า
จะเข้าสู่ปีกเสาอากาศและระบบภาครับสัญญาณตามลำดับ ในระบบภาคเครื่องรับ
จะทำหน้าที่แปลงคลื่นความถี่วิทยุ ที่สะท้อนกลับมาเป็นIF (Intermediate Frequency)
30 MHzโดยใชร่วมกับวงจร Local Oscillatorและ Mixer สัญญาณ IF 30 MHz จะถูกขยายด้วย
วงจรขยาย Log IF Amplifier เพื่อให้ 80 dB สำหรับแสดงบนจอภาพ

จอภาพเรดาร์รุ่นใหม่เป็นแบบ LCD (TFT)
ระบบจอภาพ (INDICATORS)
ลักษณะการแสดงผลบนจอภาพในรูปแบบต่างๆ แสดงข้อมูลของเป้าบนจอภาพ สำหรับเรดาร์เดินเรือโดยทั่วๆ ไป
ข้อกำหนดตามแนวทางปฏิบัติมาตรฐานของ IMO สำหรับเครื่องเรดาร์ที่ติดตั้งใหม่ตั้งแต่
วันที่ 1 กรกฎาคม 2551
-
เรือทุกลำที่อยู่ภายใต้ข้อกำหนดของ SOLAS ต้องมีระบบติดตามเป้าอัตโนมัติหรือ
Automatic Target Tracking (ATT) และข้อความเดิมที่เคยระบุไว้ว่า ATA และ ARPA
จะถูกแทนที่โดยข้อความ Automatic Target Tracking (ATT) ส่วนความสามารถของ EPA
ไม่มีปรากฏในข้อกำหนดใหม่นี้ นั่นคือระบบ ATT สำหรับเรือขนาดน้อยกว่า 500
ตันกรอสจะแทนที่ระบบ EPA ส่วนระบบ ATT สำหรับเรือขนาด 10,000 ตันกรอสขึ้นไป
จำเป็นต้องมีขีดความสามารถของ Trail Maneuver และ Automatic Acquistion
-
เครื่องเรดาร์มีคุณสมบัติในการสนับสนุนและแสดงรายงานข้อมูลเป้า AIS ได้
- เพิ่มจำนวนของเป้าที่ติดตาม
(Radar Track Targets) สำหรับเรือทุกขนาด
-
ลดมาตรฐานที่กำหนดขนาดของเรือจาก 4 ประเภทลงเหลือ 3 ประเภท คือขนาดของเรือ 500 ถึง
3,000 ตันกรอสถูกนำไปรวมกับเรือขนาด 3,000 ถึง 10,000 ตันกรอส
-
มีการแบ่งแยกอย่างชัดเจนระหว่างขนาดของเส้นผ่าศูนย์กลางจอภาพเรดาร์ที่แสดงผล
กับขนาดของตัวจอภาพที่ใช้งานของเครื่องเรดาร์
Download: IMO Radar
Performance Standards